以墙角为通道 同时实现吸附和攀爬
西南大学计算机与信息科学学院智能机器人研发团队介绍,爬墙机器人在消防救灾、军事侦察、探险救援、航空航天等方面具有广泛的应用。
现有爬墙机器人可大致分为真空吸盘式爬墙机器人、风压式爬墙机器人和粘胶式爬墙机器人。
然而,现有技术中,对上述这些爬墙机器人的研究主要集中在垂直墙面的吸附功能上,但所有的类型都存在一些缺陷:采用液压吸盘方式的爬墙机器人需要大功率部件来产生负压;采用风机抽压式的爬墙机器人对材料要求极高,造价较高;采用粘胶式的爬墙机器人除对粘性材料的要求较高外,移动效率和能源利用率不高。
近日,西南大学计算机与信息科学学院机器人研发团队首次提出并试验成功了一种全新的攀爬机器人,其利用在建筑中广泛存在的垂直外墙角作为攀爬通道,实现对建筑物的垂直攀爬。在攀爬机理上,摈弃了现有的所有存在形式,而是用一对(组)主动轮,同时实现“吸附”和“攀爬”两个功能,通过满足一定角度的主动轮布置,主动轮所产生的摩擦力可以同时形成机器人本体对墙面的吸附力和向上运动的推动力,由于完全通过摩擦力运作,因此对墙面材料的要求不高,也无需气压或者风压式的额外气压源。
据悉,这种全新的攀爬机器人在进一步完善后,具有较为广泛的用途。
管道弧面360度运动 更好进行作业
记者还了解到,随着管道技术在生产生活中的普及和利用,管道早已成为工业生产中不可缺少的重要组成部分。然而,随着管道铺设量的增加,管道问题也逐渐暴露,如管壁破损、管内异物堵塞等,影响着正常的工业生产。此外,一些管道内部结构复杂且空间狭小,人工难以进入对其进行检测维修,因此,针对不同行业的专用性管道机器人研究逐渐成为管道机器人领域的热点内容。
据介绍,在诸如GIS(气体绝缘开关设备)管道中,应用机器人具有很大挑战:第一,管道内有多种设备和部件,所以内部空间狭小;第二,管道壁面的弧面壁为圆柱的内曲面;第三,管道壁面材料不是磁吸附材料。因此,针对气体绝缘封闭开关内部空间的独特结构,迫切需要研究一种能够在GIS管道内部攀爬的非磁性弧面攀附移动机器人,该机器人需要高效实用,成本低,操作简单并易于控制,期望它能够稳定地爬行在变电站GIS管道内部并进行各种作业。目前,存在的管道机器人有轮式管道机器人、螺旋式管道机器人、仿生管道机器人、步行管道机器人、压壁式管道机器人。但是,它们要么不能适应类似GIS管道这样的狭小环境,要么不能实现360度环形运动,特别是无法攀爬抵达管道的上表面或者侧面,或者能够攀爬但是效率和可靠性低下。
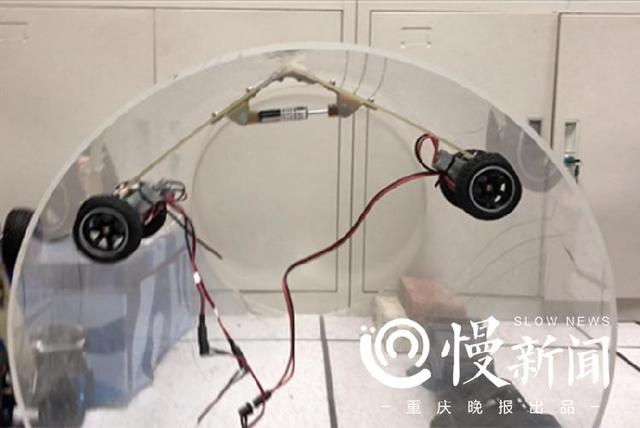
根据GIS管壁的特殊作业环境,需要研究一款具有一定弧面适应性,小于管道内曲面直径并能在弧面壁上吸附、行走和转向的管道机器人,同时,在保证机器人的各项作业任务完成前提下,其整体结构应该尽可能简单轻便,控制容易。
为此,该团队研发了一款小于管道内曲面直径的新型非磁性弧面攀附移动机器人,机器人机体主要由前向驱动模块、后向驱动模块和机身三大模块组成,前向驱动模块为单驱动双轮结构,即由一个电机驱动两个行动轮转动;后向驱动模块为双驱动结构,即两个电机分别驱动两个行动轮运动,两个行动轮的差速可以调整机体姿态和实现转向;机身由两个宽杆、连接轴和支撑杆三部分组成。“通过弹性(液压、气压或者弹簧)支撑杆的作用,机体外张使得轮组对管壁产生足够的压力,从而满足攀爬和运动的需求。”团队表示,机器人机身整体形状像一段圆弧,弧状的形态学优势更有利于机器人在狭窄的GIS内壁运动,并可以360度环向运动和前后移动,抵达任意需要的位置。可用于输油、输气管道的大型勘测。

这个团队已获三十余项国家发明专利授权
据介绍,该研发团队长期从事应用于非结构化环境、易燃易爆环境以及其它特殊工农业应用场景下的机器人研究与开发工作。目前,已经获得三十余项国家发明专利授权,初步形成了自有知识产权体系。
近年来,研究团队作为主要研究成员,先后参与了国家科技支撑计划“农村物联网综合信息服务关键技术集成与示范”(完成)、重庆市重点产业共性关键技术创新专项重点研发项目“矿山及地下工程危险环境应急探测机器人开发与产业化”(在研)等重大项目。研究室具有完备的越障机器人、特种机器人的开发、测试、验证条件,可以为相关机器人开发提供技术保障。
未来,研究团队将继续持续开发易燃易爆环境下应用的本质安全型救援探测机器人,继续提升其性能、可靠性和完成度,实现商业化生产。